as you might or might not know, I recently launched a kickstarter campaign in order to collect funding for my bachelor thesis.
Check it out: http://www.kickstarter.com/projects/808216251/mediated-touch-a-telepresence-study
The money will go towards the hardware I require for running my experiment. Part of the hardware will be a humanoid robot with 4 DOF. In the following video you can see a rough prototype of the head, which will be the most complex moving part of the robot:
(I had to add music, as my flatmates complained that they did not want to be heard talking in the background. I find Estonian makes for beautiful background sounds... but then again - I have no idea what they where saying :-D....)
I built these prototypes with parts I had around the house. The brackets where freebies which I was presented with by John Iovine from Images Scientific Instruments quite some time ago. (Thanks again, btw!...)
*
Here are some pictures of the process:
... the servos and the brackets which I used for mounting them. I'm just getting started.

Continuing to assemble things...

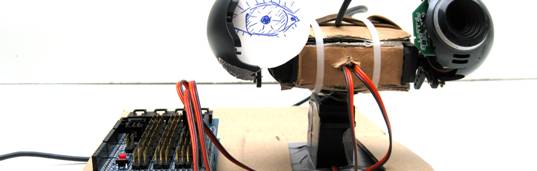
The servos did not hold as tight as I wanted them to - in order to give the whole thing some additional strength I cut thin strips of thermoplastic, heated it up and then wrapped it tightly around the joint. I like this way of attaching things as its quite effortless but super, super stable.


Chassis is finished, and firmly mounted on two bottles filled with water for stability:


Anyway thats it for now. Lets see how this whole Kickstarter thing goes :-)
Keine Kommentare:
Kommentar veröffentlichen